Indoor positioning system for drone competition
We received a request from one of the aspiring teams for the Singapore Amazing Flying Competition (SAFMC) 2024. We have received similar requests in the past for other drone competitions. Thus, it is time to explain how to build indoor positioning systems for such cases in detail.
Basic intro to be on the same page:
Drone competition map
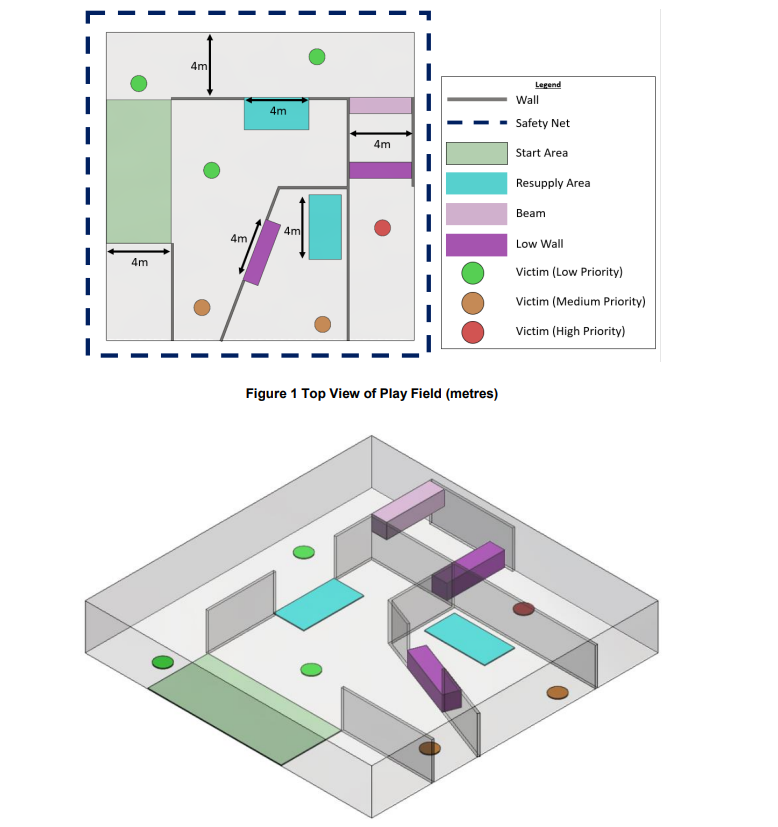
The key requirement
- To be tracked, the mobile beacon on the drone must have a direct line of sight to 3 or more stationary beacons within 30 meters
Other requirements and recommendations
Similar limitation when you have a too small base between the stationary beacons:
Or when you want to land:
Placement of beacons
As soon as the requirements for the system to work properly are understood well, placement of beacons is rather a trivial task. One must place them so that the requirements are placed with the minimal number of beacons
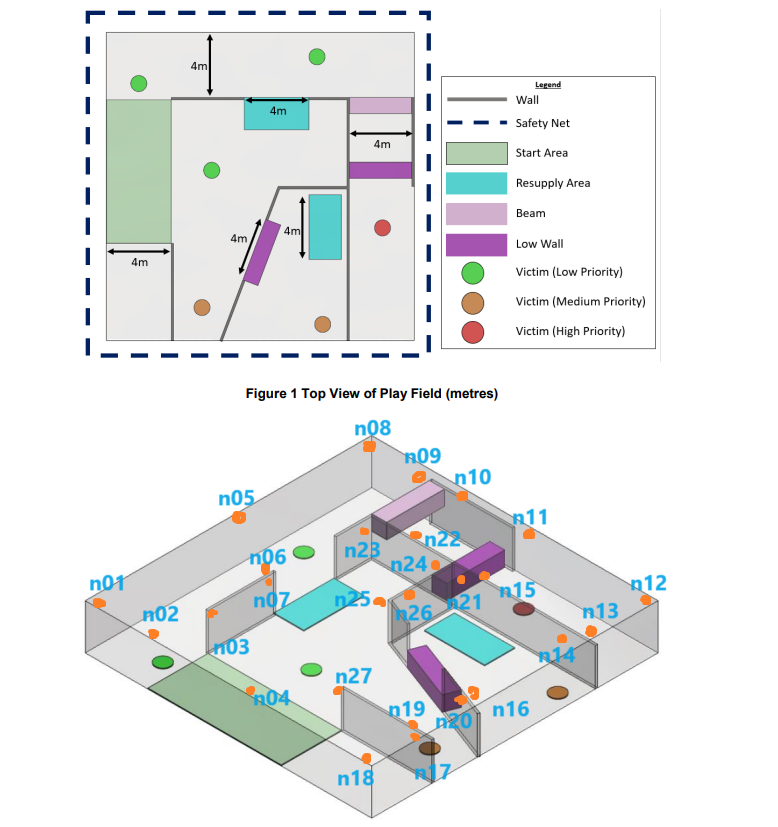
Thus, it is recommended configuration is to place 27 stationary beacons at the locations marked by orange points:
- 27 x Super-Beacons
- Additionally, in some complex points (n25, n27, maybe n6/n7 replaced with n6 only with Omni-Microphone), it is recommended to have Omni-Microphone instead of the default microphone of the Super-Beacon because Omni-Microphone has 360×360 reception diagram whereas the embedded microphone of the Super-Beacon has 360×180 diagram
- 1 x Modem v5.1 or Super-Modem
- 1 or 2 x Super-Beacons per drone. See more about Location+Direction
Time to deploy
It takes a couple of minutes to place and deploy a basic map of 4 stationary beacons in one room and to have precise tracking. No distance measurement is required. Everything is automatic and takes seconds
However, when you have multiple submaps, like in the competition case, stitching different 3D submaps with smooth handover between them may easily take days – depending on the team’s experience.
Placement of beacons, submaps, and maps:
- Placement Manual – practical advice and examples of how to mount the Marvelmind Indoor “GPS” system to achieve the best performance
- Basics about submaps, service zones, and handover zones – video intro to building large maps consisting of many submaps
- Building submaps (PDF, Video Part 1, Video Part 2) – detailed practical guidance on building large maps consisting of multiple submaps
- Step-by-step guide on building complex maps – start with a simple 2D NIA with one mobile beacon and increase complexity one step at a time
Summary
The task to fly autonomously in the environment shown on the map is not a trivial task and requires skills and understanding of the positioning technology, geometry, and drones. But it is doable. It is doable for the competition and real-world cases as well.
Random post
Categories
Tags
| M | T | W | T | F | S | S |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 | ||